Biography
Benjin Zhu is a Research Scientist at Li Auto, and a postdoctoral researcher at Tsinghua University, supervised by Prof. Jifeng DAI. He got his Ph.D from the Department of Electronic Engineering, The Chinese University of Hong Kong in 2025. He was affiliated to the MultiMedia Lab, and supervised by Prof. Hongsheng LI and Prof. Xiaogang WANG. He earned his Bachelor’s in Software Engineering from South China University of Technology in 2018.
Benjin’s current research interests include cross-embodiment VLA, and World Models with RL. He won multiple championships of TOP international competitions like the first nuScenes 3D Object Detection Challenge at WAD, CVPR 2019. Benjin has also made significant contributions to open-source computer vision frameworks, including Det3D, CVPods, and EFG that garner substantial popularity. Prior to his doctoral studies, Benjin worked at world-leading AI companies like MEGVII Research, where he was fortunate to collaborate with Dr. Gang Yu, Dr. Xiangyu Zhang and Dr. Jian Sun on topics like object detection and representation learning.
- Vision-Language-Action Models
- Diffusion Models
- World Models
- AI Infrastructure
Ph.D in Electronic Engineering, 2021 ~ 2025
The Chinese University of Hong Kong (CUHK)
B.Eng in Software Engineering, 2014 ~ 2018
South China University of Technology (SCUT)
News
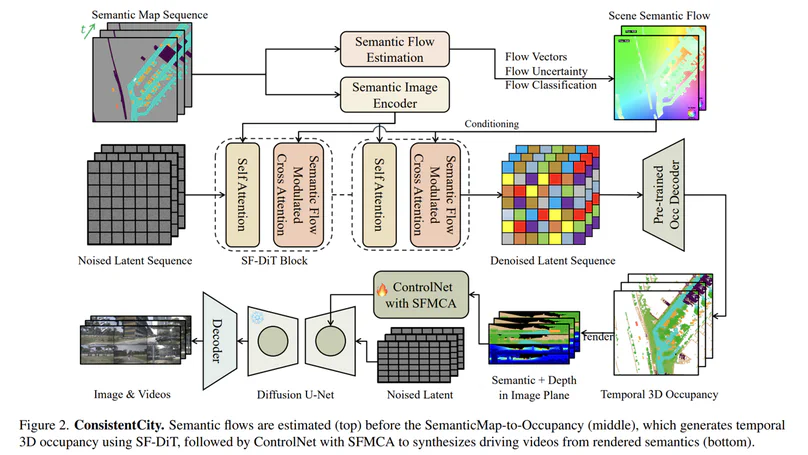
- 2025-06 ConsistentCity for temporally consistent 3D scene synthesis is accepted by ICCV 2025. ✨
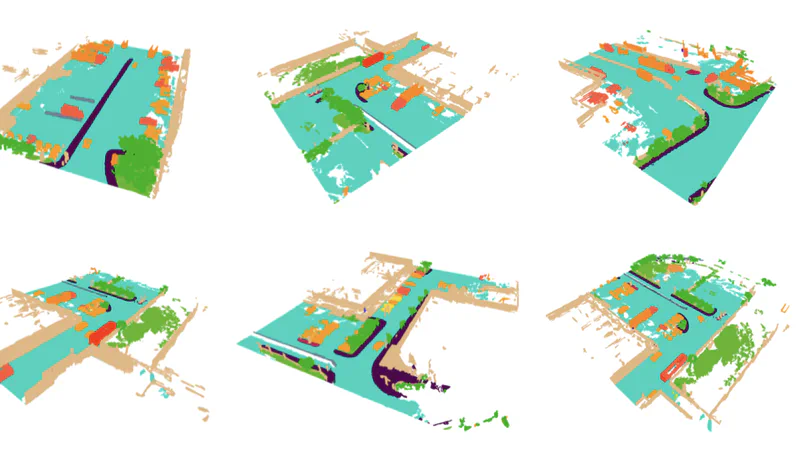
- 2024-07 The high-res nuCraft 3D Occupancy Dataset is accepted by ECCV 2024. ✨
- 2023-03 EFG, an Efficient, Flexible, and General deep learning framework is publicly available!
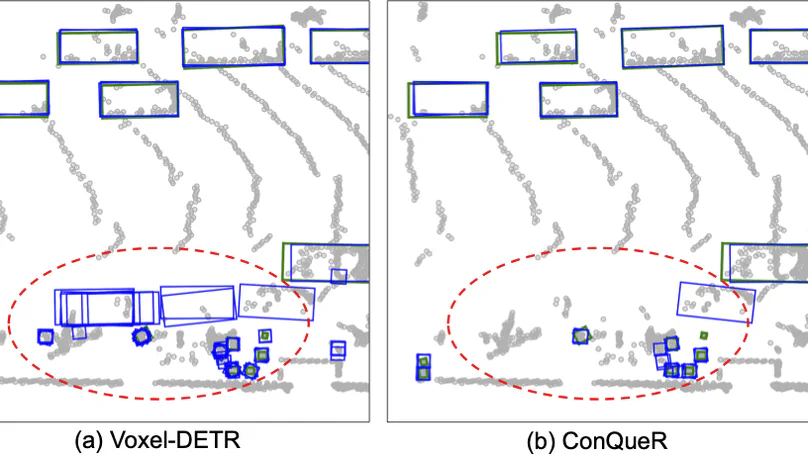
- 2022-12 ConQueR is accepted by CVPR 2023, and selected as a Highlight (Top 2.5%). ✨
Work Experience
Publications
More Publications
Projects